
Current robot energy systems are evolving from single-power solutions towardmodular, intelligent, and scenario-differentiateddirections. In the coming years, mainstream industry robot energy system architectures can be categorized into the following three major types:
(1)Centralized DC Bus System:Designed for collaborative robot clusters and fixed-base industrial robotic arms. Adopts a centralized DC bus with distributed DC-DC conversion architecture, powered by a unified 48V/72V DC bus, with an intelligent power management module distributing power to each joint driver and control subsystem.
(2)Distributed Intelligent Power System:Suitable for humanoid robots and highly integrated platforms. The robot contains multiple voltage domains (e.g., 12V, 5V, 3.3V), using intelligent load management to independently power subsystems such as vision, computing, sensing, and communication, supporting dynamic adjustment of power supply to each load based on operational status.
(3)Modular Hybrid Energy System:Designed for outdoor operations or special mission robots, it integrates a lithium battery as the main power source, fuel cells/supercapacitors as auxiliary power, and a solar storage self-replenishment system, all coordinated through an intelligent energy management system.
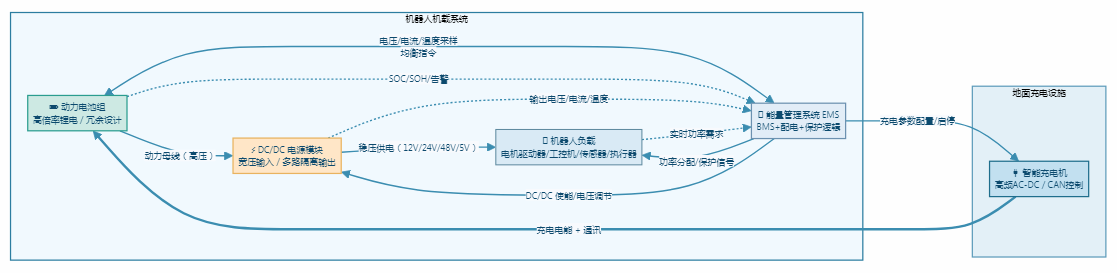
System Block Diagram:

Global leading supplier of intelligent power platform



Address: Building 9, COFCO Robotics Technology Park, Fuhai, Bao'an District, Shenzhen, Guangdong Province
Website: http://www.huadazhilian.com/
Phone: 400-803-8911
Mobile: 15766089813
Eamil: sales2@huadazhilian.com